A new study has been recently published, in which a low-cost GPS antenna connected to a Raspberry Pi system has been employed to conduct a GPS-IR experiment for water level monitoring. In this paper, the authors have described the advantages of this system; however, there are some hidden points that I am going to flesh them out.
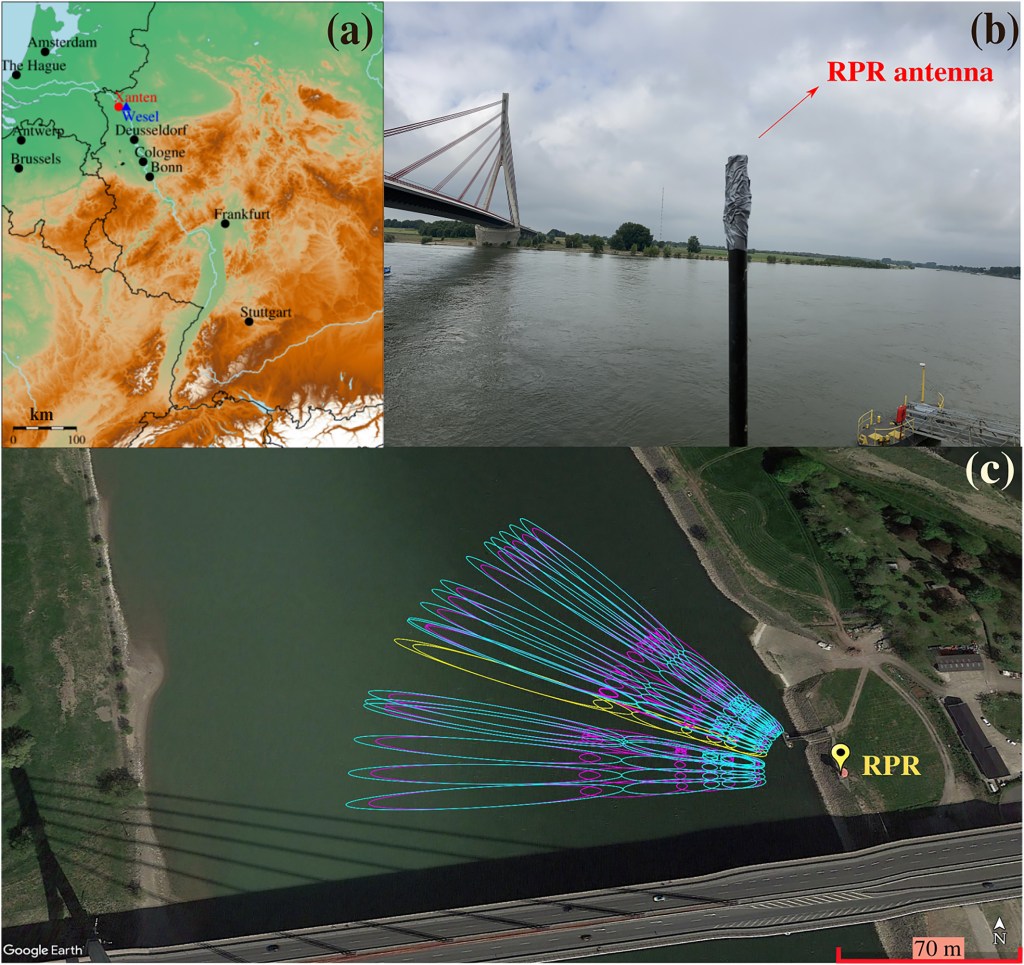
Makan Karegar, who is currently a researcher with the University of Bonn, is known for his innovative studies in various areas of GPS applications, ranged from gravimetric modelling to COVID monitroing. In his new paper, Makan, along with three other well-known reflectometrists (do we ever have such a word? reflectometrist?) analyzed the potential of low-cost GPS antennas attached to a Raspberry Pi microcomputer for water level monitoring. This system, which is called RPR (Raspberry Pi Reflectometer), was installed next to a river in Germany co-located with a guage for an interferometric reflectometry experience (you may watch this animiation of mine to see how GPS-IR works for the height estimation), and showed an acceptable RMSE (1.5 to 3 cm). Makan also properly mentioned how the advanteges of this system outweigh its limitations in both technical and financial ways. However, I would like to add three points based on experiences that I had in the past in working with a similar RPR. If you’ve ever been the reader of this blog, you probabely remember some of my experiences with RPR for soil moisture monitoring. I also had an unsucessful experience of using RPR for lake ice thickness and extent monitoring, which I will elaborate why it failed. So, I thought that I may be eligible to put some comments on this newly-published and, of course, valuable paper.
Firstly, the authors have emphasized the affordable price of this system compared to other GPS reflectometry sensors. That’s correct. Compared to what RPR gives, its cost (~$200) is reasonable; but it’s not THAT cheaper. The authors have mentioned that a very high-quality geodetic GPS receiver is higher than $10,000, which is correct, but one doesn’t need such an instrument for GPS-IR purposes. As an example, in 2019, I conducted a GPS-IR experiment using a brand-new EMLIS RS+ GNSS unit, which cost ~$700 (tax and shipping included). Besides, we didn’t have to develop any code to extract the navigation data since the unit simply gave us RINEX files, which could be directly used as an input for the gnssrefl software. More details about our experiment can be found in my M.Sc. thesis.
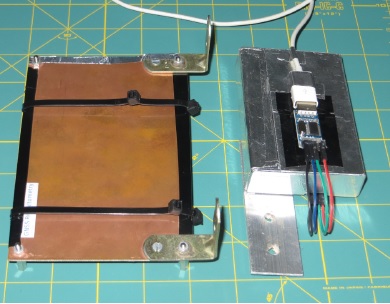
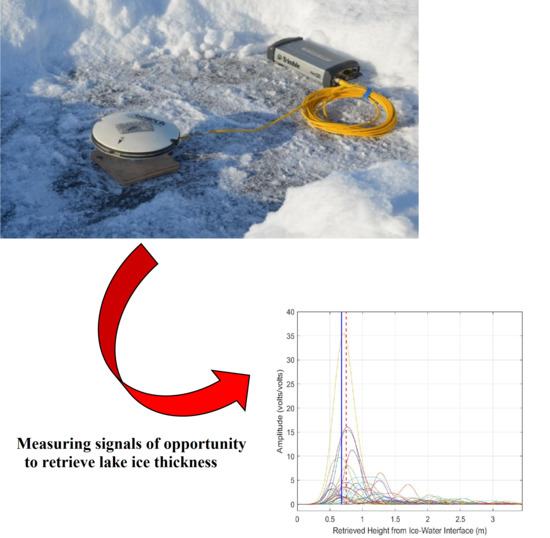
Secondly, the whole RPR system, as tabulated by the authors, is indeed low-cost. Therefore, one can connect an extra antenna with the left-hand polarization at a very low price too. The details of such a dual-polarized instrumentation has been provdied in Gary Chan‘s M.Sc. thesis, and we use the same system for our soil mositure experiment, as well as that failed lake ice research. The benefit of this designation, compared to the only-one-antenna one, is obvious for reflectometrists; no need to discriminate the direct and reflected signals, chance to receive reflections from satellites with higher elevation angles, and opportunity for comparing GPS-IR and GPS-R.
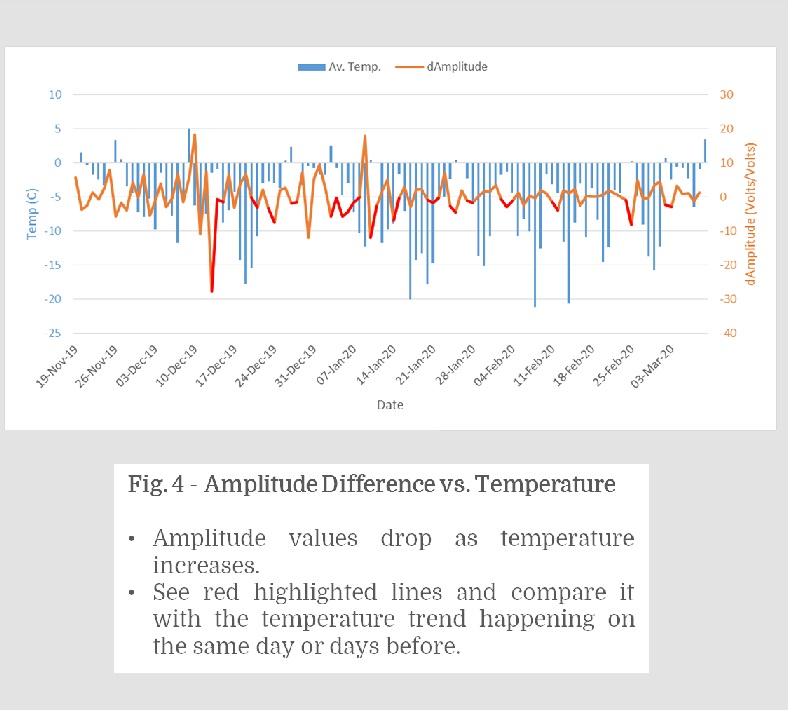
Thirdly, RPR is fragile, and that’s why our lake ice experiment failed: the RPR may work in normal temperture, but it can breaks in very cold conditions. To be more specific and clear, we had planned to install our RPR to a tower located on the shore of a lake in central Ontario to collect reflections from lake ice surface. Although, we’d tested our system in a lab fridge at -80 C to make sure it would work at very cold conditions, its USB connections broke after installation. So, before conducting any experiment, the tempeature variation of the river, or any other study site, should be taken into consideration in order to plan for any possible freezing sitatuons. The authors have wisely employed a heat sink pack to cool the system in the summer; so, it would be reasonable to think about an opposite component for the witertime as well.
Let’s look forward to seeing a network of RPRs soon, which, as suggested by the authors, is indeed technically and financially doable.