
Two papers were recently published focusing on the effect of surface elevation on terrestrial reflected GNSS signals; one is analyzing the effect of surface roughness as small-scale elevation changes on an air-borne GNSS-reflectometry platform, while the other is taking large-scale elevation changes into account and introducing an on-board constraint for DDMs produced by space-borne GNSS-R systems.
Joan, a Ph.D. candidate with Universitat Politècnica de Catalunya, Spain, working on GNSS-Reflectometry published his most recent paper on Feb 22, 2021, discussing their air-borne GNSS-R experience for retrieving soil moisture. The focus of this paper is solving non-linear reflectivity equation using an artificial neural network based algorithm instead of considering all effective variables and solving the functional model. The rationale behind this strategy is amazing; if any of the variables in the reflectivity model was estimated incorrectly, the soil moisture values retrievals could be dead wrong. For example, the impact of soil moisture on the reflectivity could be as high as ~17 dB, while the surface roughness could change the reflectivity by itself up to ~18 dB over a surface with only 4 cm RMSE in surface elevation changes. Even changes more than this value can be simply seen in farmlands. The effect of surface roughness on reflectivity can be seen in the Figure 9 of the paper.

Except for the surface roughness, other factors affecting the incoherent scattering, as the authors say, are those related to vegetation whose modelling with existing indices, e.g., VOD and NDVI, looks easier than that of the surface roughness effect. In addition, changes in the GPS integration time is an effective factor on the reflectivity, so that the higher the effective integration time is set, the less sensitive to surface roughness are the reflections. However, a bias in reflectivity in the along-track direction is introduced requiring a correction before the NDVI measurements. Moreover, the authors has used statistical metrics of the reflectivity itself, e.g. standard deviation, instead of too much ancillary data as a control for their machine learning approach, and addressed a question regarding the relationship between these statistics and the surface roughness.
The question that I would like to ask Joan and the team is about the relevance of averaging over multiple foot prints. In other words, if we conduct a multi-pass flight (rather than a single-pass one) and define the flight path so that we have multiple specular points over each specific known terrestrial point, is there anyway to cancel or reduce the impact of this small-scale topographies on the reflectivity? This suggestion may be applied in drone-based GNSS-R sensors with high maneuver abilities over farmlands. This idea has been tested and featured in summer 2020 and can be found here.
The second research, which was released on March 9, has been published by Lucinda, who is doing her Ph.D. with the University of Surrey, UK, and investigating the use of GNSS-R for Earth observations. Despite the first paper, this paper focuses on the effect of large-scale surface elevation changes on DDMs obtained from TDS-1 GNSS-R observations and their impact on soil moisture estimation. The authors mentioned that the Earth is approximated by a quasi-spherical model to predict specular points (SP) positions. Although this approximation works good for ocean scatterometry as ocean surface represents a quasi-sphere with small height anomalies smaller than 100 m, it would not always be sufficient for land sensing purposes as terrestrial topography impacts the SPs positioning accuracy. Looking at DDMs obtain from SPs with different altitude, one may see a movement in the peak-power location due to this inconsistency between the quasi-spherical model and real surface topography. An example is shown by the authors in the first figure of their paper.

The authors aimed to establish an on-board algorithm to capture signals reflected from any SP at any surface elevation, which is a huge advance comparing to similar recent studies addressing only limited special conditions. This algorithm is to be tested on a GNSS-R SSTL payload, called ToD-1. The key of the proposed algorithm is transforming SPs locations from a geodetic frame to a local geodetic frame, correcting the height element using a proper DEM, and reversely transforming the SPs coordinates to the initial geodetic frame. Results from tests operated on TDS-1 data were promising; the algorithm performed stunning at re-centering DDMs peak-powers.
Although this paper appears really inspiring for me, as I’m investigating some CYGNSS potential for land observation, a question cropped up regarding the peak-power movements among multiple DDMs assigned to one location but recorded at different times. To be more specific, a clear movement can be seen among DDMs obtained from the central area of Qinghai Lake, Tibet Plato, at different epochs. Three following figures are DDMs related to Oct 7, Oct 29, and Nov 14, 2020, respectively, obtained from CYGNSS micro-satellites; it’s obvious that there are movements along delay axis.

Surprisingly, on Feb 18, 2020, DDMs obtained from two different CYGNSS vehicle have shown different shifts in peak-power from the DDM centre.
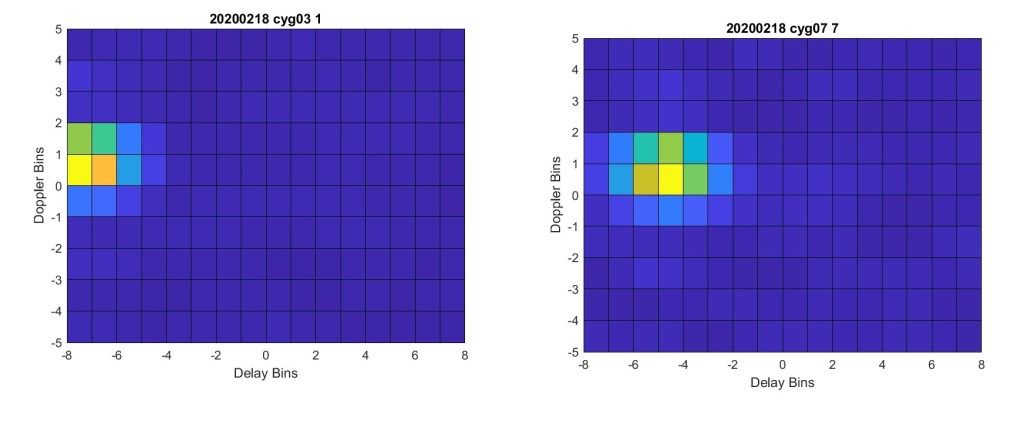
Comparing these DDMs to each other, I wonder if there are any other effective factors, rather than topography, on peak-power shifts from/towards the DDM centre. The reason that I ask this question is that Qinghai Lake’s surface can be assumed flat, and in the presence of lake ice, the ice is not so thick to cause a significant topographical movement in the lake surface height.

2 thoughts on “Topography’s Effect on GNSS reflections for Soil Moisture Retrieval Purposes”